
Current Projects
Our lab develops innovative robotic systems for real-world medical applications. From targeted diagnostics to surgical automation, each project advances precision, efficiency, and patient care through engineering solutions designed to sense, act, and adapt reliably within clinical environments.

MRI-Guided Targeted Prostate Biopsy
Development of an MRI guided targeted biopsy system for prostate cancer diagnosis. We implement device-to-image registration free approach to minimize procedure time and technical complexity. Ultimate goal is to enable single visit definitive prostate cancer diagnosis.
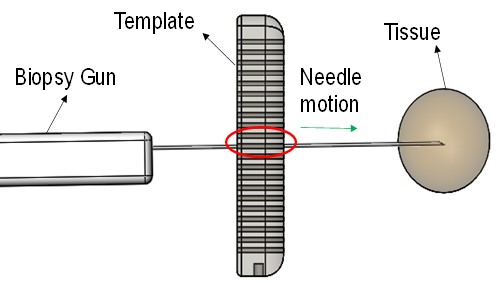
Template Design Optimization for Core Needle Biopsy
Various needle guide templates are used to guide core needle biopsies. Some result in better quality tissue samples than others. This study is to characterize and optimize guided biopsy gun operation.

Novel Double-Disc Mechanism Needle Guide
A robotic needle guide for MRI-guided prostate biopsy. The robot’s novel mechanism provides 4-DOF needle guide with a compact design comparable to manual templates.

Tele Tactile Display
Touch is an importance component of medicine and still lacking in telemedicine. This project is to develop mechanism and material to create tactile display with controllable hardness.

Semi-Robotic Laparoscopic Surgery System
Robotic laparoscopic surgery became widely available. However, a far simpler system that can provide few critical functions could also be used for simpler procedures. This project is to develop a portable laparoscopy support system.

Uterus Manipulator
Design of a robotic uterus manipulator that can provide 2-DOF manipulation during conventional or robotic laparoscopic surgery.

Single Actuation Multiple Manipulation (SAMM)
A typical electric motor delivers single actuation so multi DOF system requires the same number of motors such as robots. This project is to develop a selective transmission mechanism that can control multiple output axes using a single motor.

Air Slicer Image Visualization
A spatial visualization device that enables users to control and view cross-sections of 3D objects with greater perception of location and orientation. This visualization method utilizes human physical intuition into effective control of 3D medical models, dramatically enhancing localization and navigation ability.

Skull Mounted Robot
A light weighted skull mounted robot can provide precise positioning for maxillofacial surgeries. Since the robot is attached to the target, no patient immobilization is needed, which can be invasive.
In This Section
